Multi-GPU Training With Model Parallelism in DeepSpeed
If you’ve spent any time training large-scale neural networks, you’ve probably encountered the challenges of optimizing both speed and resource usage. Deep learning models continue to grow in complexity—think Transformer-based language models or advanced computer vision architectures—so single-GPU training can become painfully slow or even impossible due to memory constraints. That’s why techniques such as model parallelism and frameworks like DeepSpeed have become increasingly popular in the software development ecosystem.
In this article, we’ll explore what model parallelism is, how DeepSpeed supports multi-GPU training, and specific considerations for software developers who want to turbocharge their training pipelines. By the end, you’ll have a more concrete picture of how to leverage model parallelism in DeepSpeed for efficient, large-scale training sessions.
Why Multi-GPU Training Matters
When you first move from a single GPU to multiple GPUs, the immediate benefit is that your training can scale more effectively. Instead of waiting days or weeks, you can dramatically shorten that time window by distributing work across GPUs. But it’s not just about finishing your training faster. Multi-GPU setups also help when your model is too large to fit on one GPU.
In some domains, especially natural language processing, model sizes are expanding so rapidly that multi-GPU solutions are almost non-negotiable. In addition, multi-GPU training can help with iterative prototyping. If you can train faster, you can iterate through different architectures and hyperparameters more quickly. This agility is critical in a competitive environment where cutting-edge results require both experimentation and optimization.
What Is Model Parallelism?
If you’ve tried data parallelism—splitting your training data across different devices—model parallelism takes a slightly different approach. Instead of splitting your data, you split your model’s layers or parameters across multiple devices. This helps when the model itself is too large to fit comfortably in the memory of a single GPU, which is becoming more common as state-of-the-art models balloon into billions of parameters.
Model parallelism can be broken down into a few different strategies. Pipeline parallelism divides the model’s layers into stages, assigning each stage of the network to a different GPU. Tensor (or sharded) parallelism slices individual layers so that different pieces of a layer’s operations run in parallel on separate GPUs. The overarching goal is to prevent memory bottlenecks and to keep more of your GPUs busy.
What Makes DeepSpeed Unique?
DeepSpeed, developed by Microsoft, is a deep learning optimization library built on top of PyTorch. It’s designed to make distributed training scalable and user-friendly. A few core features that set DeepSpeed apart include:
- ZeRO Optimizer: Zero Redundancy Optimizer (ZeRO) is built to reduce memory usage by partitioning model states (such as gradients) across multiple GPUs. This allows you to train larger models without running out of memory.
- Flexible Parallelism: DeepSpeed supports both data and model parallelism (including pipeline parallelism and tensor parallelism), giving developers freedom to mix and match strategies based on their architecture and hardware constraints.
- Ease of Integration: If you’re already comfortable with PyTorch, integrating DeepSpeed into your training script typically involves minimal changes. You can wrap your model and optimizer with DeepSpeed features to unlock distributed training benefits.
Whether you’re training a large language model or a complex image-based network, DeepSpeed’s framework ensures you can scale effectively. It streamlines the process so you don’t have to write your own complex parallelization code.
Choosing the Right Parallel Strategy
A common question is: should I use data parallelism, model parallelism, or both? The answer depends on your goals and constraints.
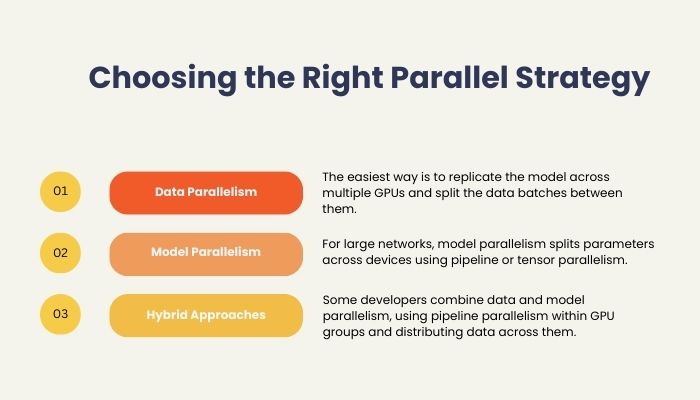
- Data Parallelism: This is generally the easiest approach. You replicate the model on multiple GPUs and split batches of data among them. However, if the model is super large, you might run out of memory even on a high-memory GPU. If that’s the case, model parallelism is the next logical step.
- Model Parallelism: If you’re dealing with massive networks, model parallelism (via pipeline or tensor parallelism) can distribute parameters across multiple devices. This helps prevent any single GPU from becoming a memory bottleneck.
- Hybrid Approaches: Some developers combine data and model parallelism—using, for example, pipeline parallelism within each GPU group while also spreading training data across multiple GPU groups. DeepSpeed simplifies these hybrid approaches, allowing you to configure them in a straightforward manner.
Implementing Model Parallelism With DeepSpeed
So how do you actually get started? Below is a high-level overview of what a typical setup might look like:
- Installation: Make sure you have the DeepSpeed library installed in your Python environment. You’ll also need a standard deep learning stack (PyTorch, CUDA, etc.).
- Define Your Model: Write or import your PyTorch model. This can be anything from a standard Transformer to a custom architecture you’re experimenting with.
- Create a Configuration JSON: DeepSpeed relies on a configuration file where you specify options like the type of parallelism you want (pipeline or tensor), how many GPUs are available, batch sizes, and other hyperparameters.
- Wrap Your Model and Optimizer: In your Python script, you’ll initialize DeepSpeed (e.g., model_engine, optim_engine, training_dataloader = deepspeed.initialize(…)). This step automatically partitions data and/or model parameters based on your configuration file.
- Training Loop as Usual: Your training loop often looks similar to a typical PyTorch loop—iterating through batches, calling forward(), computing loss, calling backward(), and stepping the optimizer. DeepSpeed handles distributing the work among GPUs in the background.
Best Practices to Keep in Mind
- Profiling Is Key: Even with frameworks like DeepSpeed, you’ll want to monitor GPU utilization and memory usage. Profiling can help you see where your bottlenecks are (e.g., communication overhead vs. computation).
- Batch Sizes Matter: Large batch sizes can make multi-GPU training more efficient, but they might also affect model convergence. Experiment with different batch sizes and learning rates to find a sweet spot.
- Mixed Precision: Consider using mixed precision training (e.g., FP16) to reduce memory consumption and speed up computations. DeepSpeed supports this seamlessly, so it can be a big performance win.
- Monitor Communication Overheads: Sometimes, distributing your model across multiple GPUs introduces overhead from data transfers. Keep an eye on these overheads; if they become too large, they can negate the benefits of parallelism.
Common Pitfalls and How To Avoid Them
- Over-Complicating the Setup: It’s easy to get carried away with multiple forms of parallelism at once. Start simple—maybe with just data parallelism, then add model parallelism if you’re truly hitting memory limits.
- Ignoring Hyperparameter Tuning: When you switch to multi-GPU training, your hyperparameters may need tweaking. Don’t assume that a single-GPU configuration’s settings will seamlessly transfer.
- Skimping on Testing and Validation: Distributing your model across multiple GPUs can introduce new bugs, especially if you have custom layers that might behave unexpectedly when partially split. Always test your model after parallelization to confirm the outputs make sense.
Real-World Examples
You’ll often see DeepSpeed in action for training large Transformer models like GPT variants or BERT derivatives. Researchers pushing the boundaries of language modeling rely on frameworks like DeepSpeed to manage memory usage without sacrificing training speed. This typically involves a combination of pipeline parallelism (breaking the model into chunks of layers) and tensor parallelism (splitting large layers among GPUs).
Another real-world case might be advanced recommender systems. As these systems incorporate user data from millions of sources and handle extremely large embedding tables, they quickly become too big for a single GPU. Model parallelism cuts these massive embeddings into manageable pieces distributed across GPUs.
Final Thoughts
Model parallelism in DeepSpeed offers a powerful way to scale your training to massive models without blowing your GPU memory budget. While the initial setup may seem intimidating, the payoff in terms of speed and memory efficiency is well worth it. As always, approach multi-GPU configurations with a healthy mix of experimentation and caution. Keep an eye on communication overheads, memory usage, and potential changes in model accuracy.
Ultimately, DeepSpeed’s secret sauce is that it wraps a lot of complex parallelization logic into a user-friendly package. This means you can keep focusing on building innovative models and new features, rather than reinventing the wheel for distributed training. Whether you’re a software engineer working on next-gen AI products or a researcher tackling large-scale model experimentation, harnessing model parallelism with DeepSpeed can lighten your workload, speed up results, and help you push the boundaries of what’s possible.
